OS04: Scheduling
Based on Chapter 3 of [Hai19]
(Usage hints for this presentation)
This presentation is archived and will not receive further updates. Updated presentations on Operating Systems are available in the course IT Systems.
Computer Structures and Operating Systems 2023
Dr. Jens Lechtenbörger (License Information)
1. Introduction
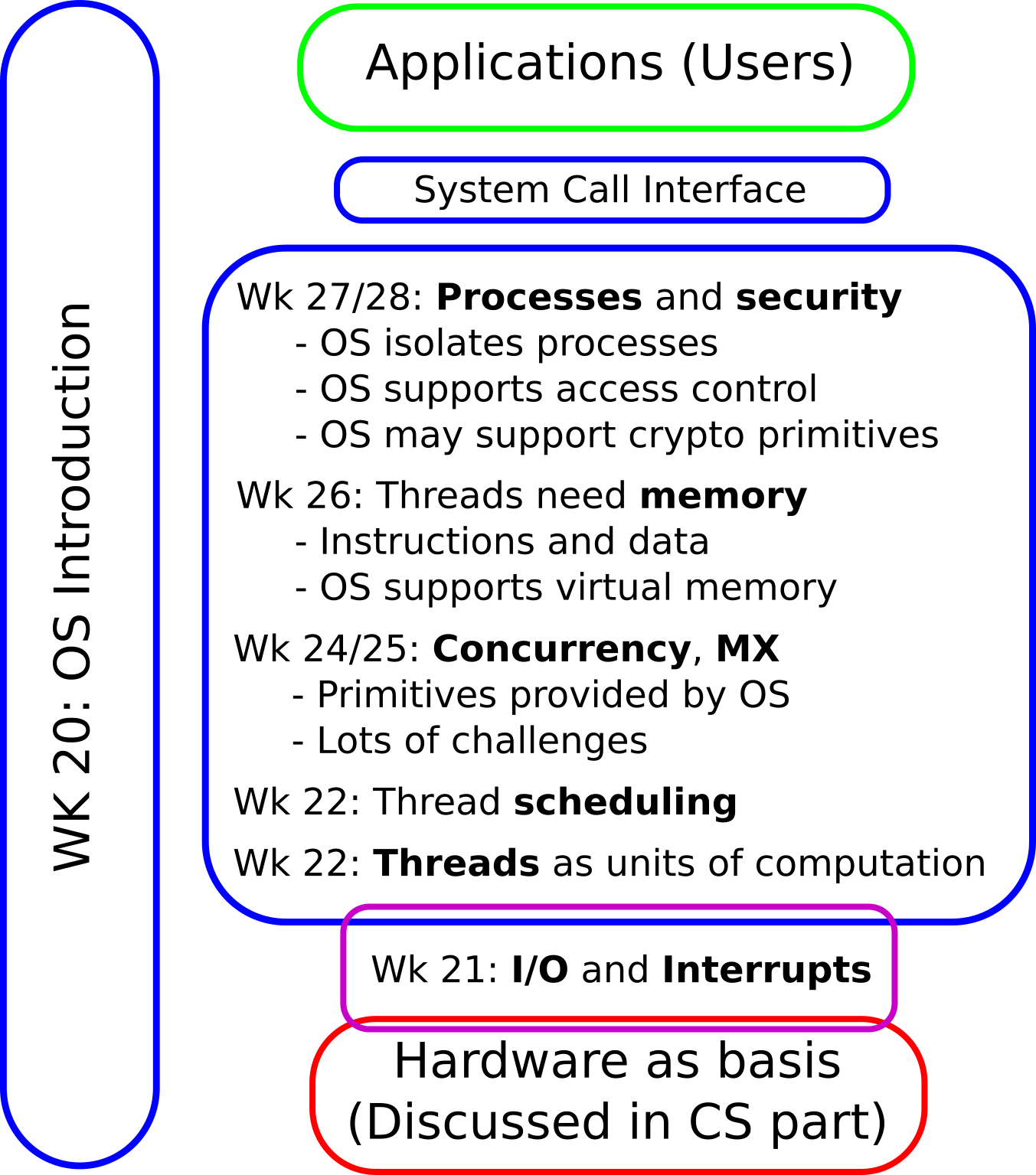
1.1. OS Plan
- OS Overview (Wk 20)
- OS Introduction (Wk 21)
- Interrupts and I/O (Wk 21)
- Threads (Wk 23)
- Thread Scheduling (Wk 24)
- Mutual Exclusion (MX) (Wk 25)
- MX in Java (Wk 25)
- MX Challenges (Wk 25)
- Virtual Memory I (Wk 26)
- Virtual Memory II (Wk 26)
- Processes (Wk 27)
- Security (Wk 28)
1.2. Previously on OS …
- What is multitasking?
- What are blocking system calls?
- What types of threads exist?
- What is preemption?
1.2.1. CPU Scheduling

CPU scheduling
Figure © 2016 Julia Evans, all rights reserved; from julia's drawings. Displayed here with personal permission.
1.3. Today’s Core Questions
- How does the OS manage the shared resource CPU? What goals are pursued?
- How does the OS distinguish threads that could run on the CPU from those that cannot (i.e., that are blocked)?
- How does the OS schedule threads for execution?
1.4. Learning Objectives
- Explain thread concept (continued)
- Including states and priorities
- Explain scheduling mechanisms and their goals
- Apply scheduling algorithms
- FCFS, Round Robin
1.5. Retrieval Practice
- Before you continue, answer the following; ideally, without
outside help.
- What is a process, what a thread?
- What does concurrency mean?
- How does it arise?
- What is preemption?
1.5.1. Thread Terminology
Table of Contents
2. Scheduling
2.1. CPU Scheduling
- With multitasking, lots of threads share resources
- Focus here: CPU
- Scheduling (planning) and dispatching (allocation) of CPU via OS
- Non-preemptive, e.g., FIFO scheduling
- Preemptive, e.g., Round Robin scheduling
- Typical case for desktop OSs
- Among all threads, schedule and dispatch one, say T0
- Allow T0 to execute on CPU for some time, then preempt it
- Repeat, go to step (1)
- Typical case for desktop OSs
- (Similar decisions take place in industrial production, which you may know from operations management)
2.2. Sample Scheduling Goals
- Scheduling is hard, as various goals with trade-offs exist
- Trade-off: Improvement for one goal may negatively affect others (discussed subsequently)
- Sample goals
- Efficient resource usage
- Fairness (e.g., equal CPU shares per thread)
- Response time (definition)
- Throughput (definition)
3. Thread States
3.1. Reasons to Distinguish States
- Recall: Some threads may be blocked
- E.g., wait for I/O operation to finish or
sleepsystem call (recall Simpler2Threads)- More generally, threads may perform blocking system calls
- Busy waiting
would be a waste of CPU resources
- If other threads could run on CPU
- E.g., wait for I/O operation to finish or
- OS distinguishes thread states (details subsequently)
- Tell threads apart that might perform useful computations (runnable) on the CPU from those that do not (blocked/waiting)
- Scheduler does not need to consider waiting threads
- Scheduler considers runnable threads, selects one, dispatches that for execution on CPU (which is then running)
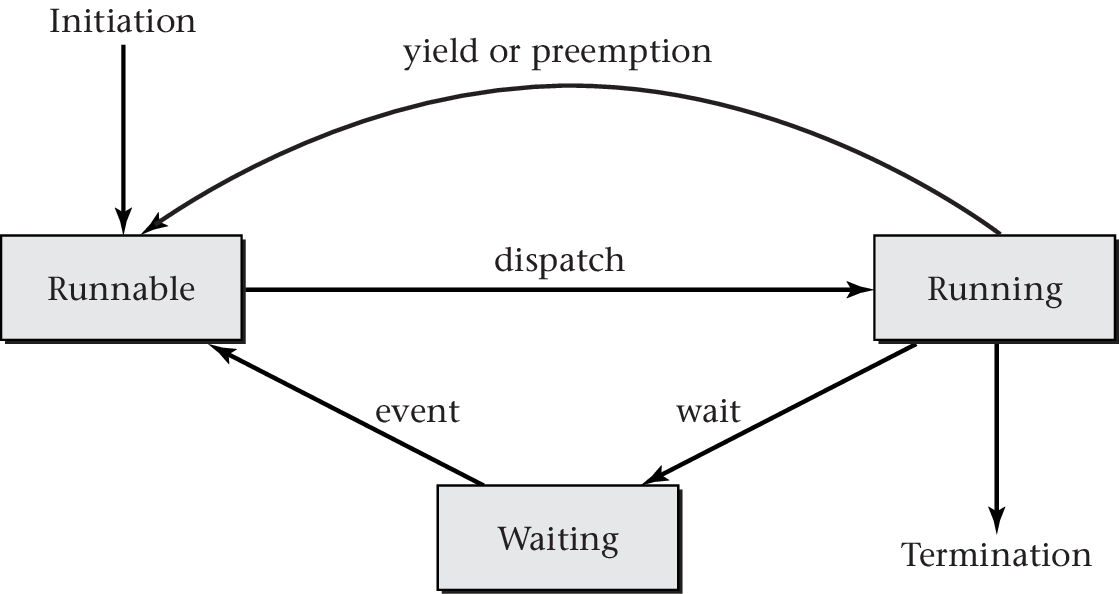
3.2. OS Thread States
- Different OSs distinguish different sets of states; typically:
- Running: Thread(s) currently executing on CPU (cores)
- Runnable: Threads ready to perform computations
- Waiting or blocked: Threads waiting for some event to occur
- OS manages states via queues
(with suitable data structures)
- Run queue(s): Potentially per CPU core
- Containing runnable threads, input for scheduler
- Wait queue(s): Potentially per event (type)
- Containing waiting threads
- OS inserts running thread here upon blocking system call
- OS moves thread from here to run queue when event occurs
- Containing waiting threads
- Run queue(s): Potentially per CPU core
3.3. Thread State Transitions
3.4. Scheduling Vocabulary
4. Scheduling Goals
4.1. Goal Overview
- Performance
- Throughput
- Number of completed threads (computations, jobs) per time unit
- More important for service providers than users
- Response time
- Time from thread start or interaction to useful reaction
- Throughput
- User control
- Resource allocation
- Mechanisms for urgency or importance, e.g., priorities
4.1.1. Throughput
- To increase throughput, avoid idle times of CPU
- Thus, reassign CPU when currently running thread needs to wait
- Context switching necessary
- Recall: Context switching comes with overhead
- Overhead reduces throughput
4.1.2. Response Time
- Frequent context switches may help for small response time
- However, their overhead hurts throughput
- Responding quickly to one thread may slow down another one
- May use priorities to indicate preferences
4.1.3. Resource Allocation
- What fraction of resources for what purpose?
- Proportional share scheduling
- E.g., multi-user machine: Different users obtain same share
of CPU time every second
- (Unless one pays more: Larger share for that user)
- E.g., multi-user machine: Different users obtain same share
of CPU time every second
- Group scheduling: Assign threads to groups, each of which
receives its proportional share
→ Linux scheduler later on
4.2. Priorities in Practice
- Different OSs (and execution environments such as Java) provide
different means to express priority
- E.g., numerical priority, so-called niceness value, deadline, …
- Upon thread creation, its priority can be specified (by the
programmer, with default value)
- Priority recorded in TCB
- Sometimes, administrator privileges are necessary for “high” priorities
- Also, OS tools may allow to change priorities at runtime
4.3. Thread Properties in Java
- Java API
- “Every thread has a priority. Threads with higher priority are executed in preference to threads with lower priority.”
- May interpret as: Preemptive, priority-driven scheduling
- Priorities via integer values
- Higher number → more CPU time
- Preemptive
- Current thread has highest priority
- Newly created thread with higher priority replaces old one on CPU
- Most of the time (above quote from API is vague)
- Time slices not guaranteed (implementation dependent)
- Starvation possible
5. Scheduling Mechanisms
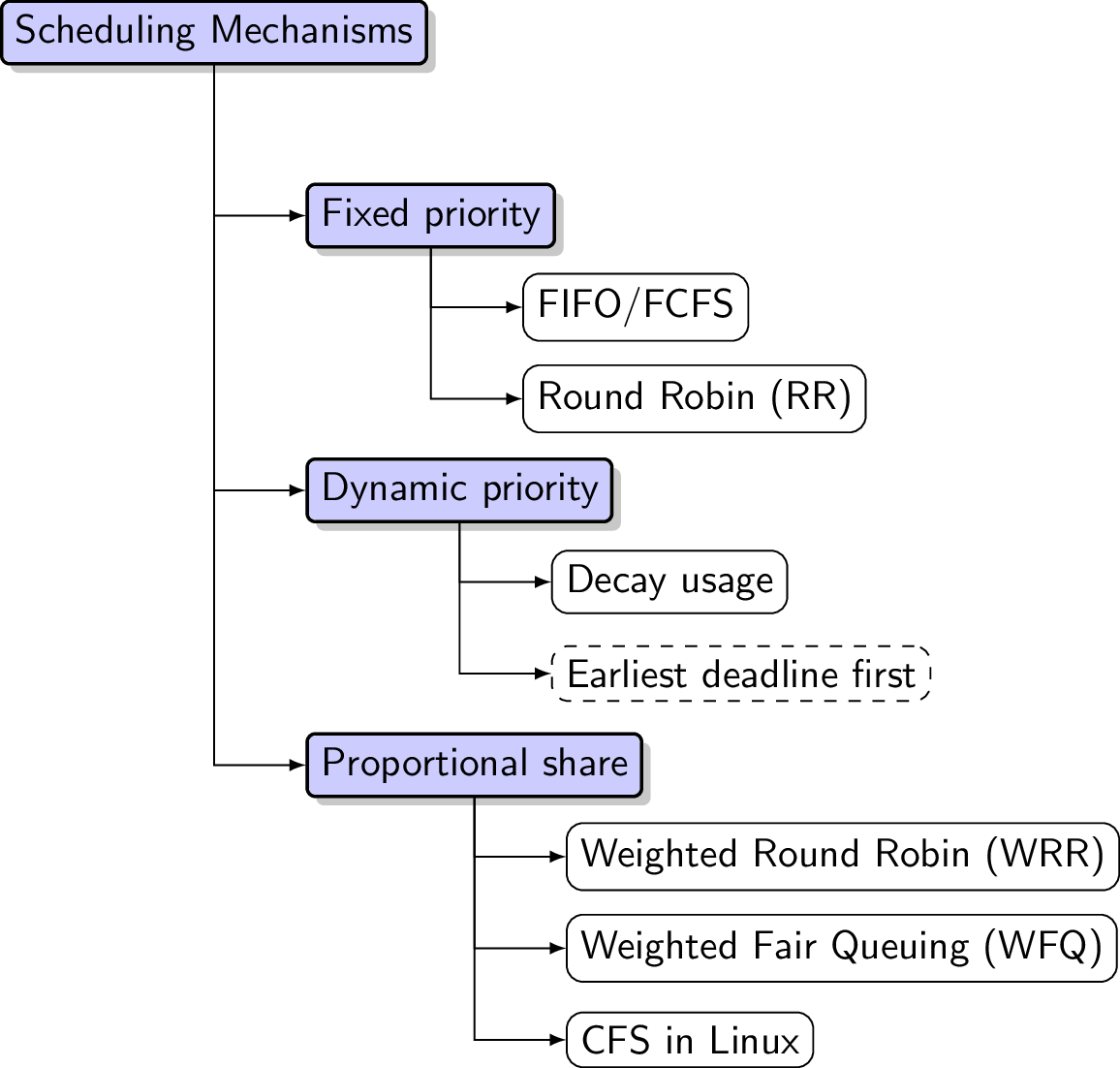
5.1. Three Families of Schedulers
- This section covers three families of schedulers
- Visualization on right shows structure of this section
- With sample algorithms per family
5.1.1. Notes on Scheduling
- For scheduling with pen and paper, you need to know
arrival times and service times for threads
- Arrival time: Point in time when thread created
- Service time: CPU time necessary to complete thread
- (For simplicity, blocking I/O is not considered; otherwise, you would also need to know frequency and duration of I/O operations)
- OS does not know either ahead of time
- OS creates threads (so, knowledge of arrival time is not an issue) and inserts them into necessary data structures during normal operation
- When threads terminate, OS again participates
- Thus, OS can compute service time after the fact
- (Some scheduling algorithms require service time for scheduling decisions; then threads need to declare that upon start. Not considered here.)
5.2. Fixed-Priority Scheduling
- Use fixed, numerical priority per thread
- Threads with higher priority preferred over others
- Smaller or higher numbers may indicate higher priority: OS dependent
- Threads with higher priority preferred over others
- Implementation alternatives
- Single queue ordered by priority
- Or one queue per priority
- OS schedules threads from highest-priority non-empty queue
- Scheduling whenever CPU idle or some thread becomes runnable
- Dispatch thread of highest priority
- In case of ties: Run one until end (FIFO) or serve all Round Robin
- Dispatch thread of highest priority
5.2.1. Warning on Fixed-Priority Scheduling
- Starvation of low-priority threads possible
- Starvation = continued denial of resource
- Here, low-priority threads do not receive resource CPU as long as threads with higher priority exist
- Careful design necessary
- E.g., for hard-real-time systems (such as cars, aircrafts, power plants)
- (Beware of priority inversion, a topic for a later presentation!)
- Starvation = continued denial of resource
5.2.2. FIFO/FCFS Scheduling
- FIFO = First in, first out
- (= FCFS = first come, first served)
- Think of queue in supermarket
- Non-preemptive strategy: Run first thread until completed (or blocked)
- For threads of equal priority
5.2.3. Round Robin Scheduling
Key ingredients
- Time slice (quantum, q)
- Timer with interrupt, e.g., every 30ms
- Queue(s) for runnable threads
- Newly created thread inserted at end
- Scheduling when (1) timer interrupt triggered or (2) thread ends
or is blocked
- Timer interrupt: Preempt running thread
- Move previously running thread to end of runnable queue (for its priority)
- Dispatch thread at head of queue (for highest priority) to CPU
- With new timer for full time slice
- Thread ends or is blocked
- Cancel its timer, dispatch thread at head of queue (for full time slice)
- Timer interrupt: Preempt running thread
- Time slice (quantum, q)
- Video tutorial in Learnweb
5.3. Dynamic-Priority Scheduling
- With dynamic strategies, OS can adjust thread priorities during execution
- Sample strategies
- Earliest deadline first
- For tasks with deadlines — discussed in [Hai19], not part of learning objectives
- Decay Usage Scheduling
- Earliest deadline first
5.3.1. Decay Usage Scheduling
- General intuition:
I/O bound
threads are at unfair disadvantage. (Why?)
- Decrease priority of threads in running state
- Increase priority of threads in waiting state
- Allows quick reaction to I/O completion (e.g, user interaction)
- OS may manage one queue of threads per priority
- Threads move between queues when priorities change
- Falls under more general pattern of multilevel feedback queue schedulers
- Threads move between queues when priorities change
- Technically, threads have a base priority that is adjusted by OS
- Use Round Robin scheduling (for non-empty queue of highest-priority threads) after priority adjustments
5.3.2. Decay Usage Scheduling in Mac OS X
- OS keeps track of CPU usage
- Usage increases linearly for time spent on CPU
- Usage recorded when thread leaves CPU (yield or preempt)
- Usage decays exponentially while thread is waiting
- Usage increases linearly for time spent on CPU
- Priority adjusted downward based on CPU usage
- Higher adjustments for threads with higher usage
- Those threads’ priorities will be lower than others
- Higher adjustments for threads with higher usage
5.3.3. Variant in MS Windows
- Increase of priority when thread leaves waiting state
- Priority boosting
- Amount of boost depends on wait reason
- More for interactive I/O (keyboard, mouse) then other types
- After boost, priority decreases linearly with increasing CPU usage
5.4.1. WRR vs WFQ with sample Gantt Charts
- Threads T1, T2, T3 with weights 3, 2, 1; service times > 30ms; q = 10ms
- Supposed order of arrival: T1 first, T2 second, T3 third
- If threads are not done after shown sequence, start over with T1


{kind=link}
{kind=link}
5.5. CFS in Linux
- CFS = Completely fair scheduler
- Actually, variant of WRR above
- Weights determined via so-called niceness values
- (Lower niceness means higher priority)
- Weights determined via so-called niceness values
- Actually, variant of WRR above
- Core idea
- Keep track of how long threads were on CPU
- Scaled according to weight
- Time spent on CPU called virtual runtime
- Represented efficiently via red-black tree
- Schedule thread that is furthest behind
- This thread received least amount of CPU time → allow to catch up
- Until preempted or time slice runs out
- (Some details in [Hai19])
- Keep track of how long threads were on CPU
5.6. When to Schedule
- Unless explicitly specified otherwise, we consider preemptive
scheduling with time slices and priorities
- Threads may be removed from CPU before they are “done”
- As with Linux kernel, under stricter interpretation than Java’s:
- Threads may be removed from CPU before they are “done”
- Scheduling based on thread states, priorities, and time slices
- Sample events that may initiate scheduling
- Thread state(s) change
- E.g., thread created or finished, blocking system call, I/O finished; later: (un-) locking
- Thread priorities change
- Time slice runs out
- Thread state(s) change
- Sample events that may initiate scheduling
5.7. Self-Study Task for Scheduling
This task is available for self-study in Learnweb.
Perform Round Robin scheduling given the following situation:
| q=4 | Thread | Arrival Time | Service Time |
|---|---|---|---|
| T1 | 0 | 3 | |
| T2 | 1 | 6 | |
| T3 | 4 | 3 | |
| T4 | 9 | 6 | |
| T5 | 10 | 2 |
6. Pointers beyond Class Topics
6.1. Fair Queuing
- Fair queuing is a general technique
- Also used, e.g., in computer networking
- Intuition
- System is fair if at all times every party has
progressed according to its share
- This would require infinitesimally small steps
- System is fair if at all times every party has
progressed according to its share
- Reality
- Approximate fairness via “small” discrete steps
- E.g., CFS
6.1.1. CFS with Blocking
- Above description of CFS assumes runnable threads
- Blocked threads lag behind
- If blocked briefly, allow to catch up
- If blocked for a long time (above threshold), they would
deprive all other threads from CPU once awake again
- Hence, counter-measure necessary
- Give up fairness
- Forward virtual runtime to be slightly less than minimum of previously runnable threads
- Hence, counter-measure necessary
- Effect similar to dynamic priority adjustments of decay usage schedulers
6.1.2. CFS with Groups
- CFS allows to assign threads to (hierarchies of) groups
- Scheduling then aims to treat groups fairly
- For example
- One group per user
- Every user obtains same CPU time
- User-defined groups
- E.g., multimedia with twice as much CPU time as programming (music and video running smoothly despite compile jobs)
- One group per user
7. Conclusions
7.1. Summary
- OS performs scheduling for shared resources
- Focus here: CPU scheduling
- Subject to conflicting goals
- CPU scheduling based on thread states and priorities
- Fixed vs dynamic priorities vs proportional share
- CFS as example for proportional share scheduling
Bibliography
- [Hai19] Hailperin, Operating Systems and Middleware – Supporting Controlled Interaction, revised edition 1.3.1, 2019. https://gustavus.edu/mcs/max/os-book/
License Information
This document is part of an Open Educational Resource (OER) course on Operating Systems. Source code and source files are available on GitLab under free licenses.
Except where otherwise noted, the work “OS04: Scheduling”, © 2017-2023 Jens Lechtenbörger, is published under the Creative Commons license CC BY-SA 4.0.
In particular, trademark rights are not licensed under this license. Thus, rights concerning third party logos (e.g., on the title slide) and other (trade-) marks (e.g., “Creative Commons” itself) remain with their respective holders.